What is the longest continuous route on existing trails in the Gila National Forest, that does not repeat any segment (but intersections are OK)?
And what is the longest continuous loop?
Can the result be mapped and documented as a Long Trail to share with hikers?Sagebrush
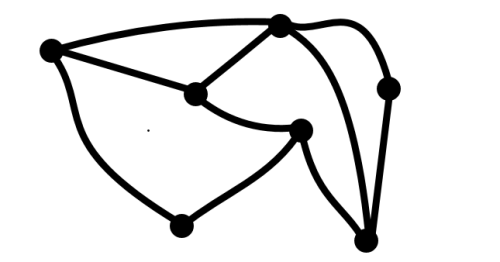
Graph Theory is a branch of mathematics that can help us analyze a trail network. A graph has nodes (or points or vertices) that are connected by edges, and can be represented visually:
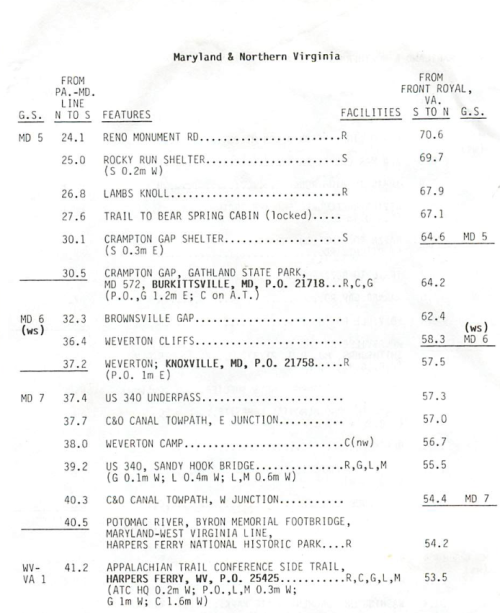
Long distance hikers, especially old-school hikers before hiking apps, have been accustomed to rely upon “databooks“, a brief text summary of the important intersections, water sources, features, and distances of a long hike. Here is a portion of a page from the Appalachian Trail 1987 databook, a slim pocket-size saddle-stapled booklet.
Not all backpackers use a databook during their hike, even pre-app, but it is still useful for planning prior to the trip. Some hikers do find an advantage in reading a text summary on trail, rather than squinting at a topo map representation on their smartphone screen. Hike your own hike; your mileage may vary; use tools and do not let them use you.
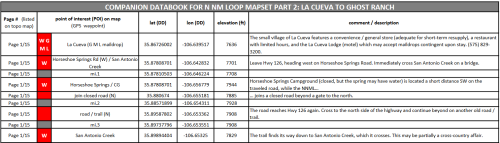
In our previous post, we were able to find a long loop route in the Gila National Forest (that does not repeat any segment), in the form of a numeric list of nodes. Our graph imported via OSMnx from OpenStreetMap includes extra information as node attributes and edge attributes, that we can extract in a Pythony way to make our own databook of sorts. Here is an example of the text information in one edge of our graph.
From that information we can generate a summary from our Euler graph.
MILE ELEVATION TRAIL INTERSECTION
...
105.0 6509 Hells Hole Trail #268 West Fork Trail #151
105.5 6529 Trail #785 Hells Hole Trail #268
106.0 6483 West Fork Trail #151 Trail #785
109.7 6834 Turkey Creek Trail #155 West Fork Trail #151
111.8 7851 Mogollon Creek Trail #153 Turkey Creek Trail #155
...
The Python code is fairly short (excluding the altitude part, which is not included in our OSM data). The column format is enabled by the library columnar, exceedingly easy to use.
def report_path(Q, txt='',freedom_units=False,lat_long=False):
meters_to_mile = 0.0006213712
meters_to_feet = 3.28084
meters_to_km = 0.001
if nx.is_eulerian(Q):
total_length = 0
data = []
for u,v,k in nx.eulerian_circuit(Q, keys=True):
data_line = []
if freedom_units:
data_line.append(str(round(total_length*meters_to_mile,1)))
else:
data_line.append(str(round(total_length*meters_to_km,1)))
d = Q.get_edge_data(u,v)[k]
length=0
if 'length' in d:
length = d['length'] #meters
total_length += length
node_attr = Q.nodes(data=True)[u]
long = node_attr['x']
lat = node_attr['y']
if lat_long:
data_line.append(lat)
data_line_append(long)
elevation = get_elevation(lat,long) #in meters
elevation *= meters_to_feet #freedom units
if freedom_units:
data_line.append(str(round(elevation*meters_to_feet)))
else:
data_line.append(str(round(elevation)))
trail_name=''
if 'name' in d:
trail_name = d['name']
if not isinstance(trail_name, str):
trail_name = ','.join(trail_name) #in case is a list
data_line.append(trail_name)
crossing = set()
crossing_txt = ''
for u,neightbor,k,d in Q.edges(u,data=True, keys=True):
if 'name' in d:
name = d['name']
if not isinstance(name, str): #FIX with a foreach
name = ','.join(name) #in case is a list
if name != trail_name:
crossing.add(name)
if len(crossing)>0:
crossing_txt = ','.join(crossing)
data_line.append(crossing_txt)
data.append(data_line)
header = []
if freedom_units:
header.append('MILE')
else:
header.append('KM')
if lat_long:
header.append('LAT')
header.append('LONG')
header.append('ELEVATION')
header.append('TRAIL')
header.append('INTERSECTION')
table = columnar(data, header, no_borders=True)
print(table)
else:
print('The graph is not eulerian')
One alternative, that only occurred to me after I had written this, is to output the route as CSV (comma separated values), import into a spreadsheet, and make any changes to presentation and format within the spreadsheet, and eventually export as PDF.
We still do not have water sources, towns, fence or road crossings, etc. I will go off and have a long think on how to include those features automagically.
In our last episode we added random “noise” to the length values of each segment of our trail graph, and for each iteration of random values we did our normal routine to make an Euler graph, and therefore find a long hiking loop without repeating any trail sections:
networkx.algorithms.min_weight_matching() on the fuzzed length odd-nodes graph
Delete trail segments between matched nodes to make an all-even node graph
Restore 4-nodes that we saved previously
Take the largest subgraph, since deleting bits of trails may create disconnected islands
If the graph is Eulerian, see if the total length is larger than anything we have tried before (using the actual length values, not the fuzzed lengths).
With our fuzzing routine, we increased our best try at an Euler graph from an initial solution of 154 miles to a respectable 228 miles after 200 or so iterations.
Now, let us alter our approach, doing a technique I am calling “gradient fuzz”. We fuzz our original graph like before, but if the resulting solution is the longest, we save the fuzzed graph as our next input, and fuzz the fuzzed graph instead of fuzzing our original graph.
In other words, if we find a better solution, try to improve that solution instead of continuing to try to improve the original input.
The code needs only minor changes.
def fuzz_min_weight_matching(Q):
T = nx.Graph()
for u, v, d in Q.edges(data=True):
len = d['length']
len = len * (1 + random.random())
T.add_edge(u,v,length=len)
return T, nx.min_weight_matching(T,weight='length')
max_fuzzed_Graph = None
while j<1000:
if max_fuzzed_Graph == None:
fuzzed_Graph, matching =
fuzz_min_weight_matching(K)
else:
fuzzed_Graph, matching =
fuzz_min_weight_matching(max_fuzzed_Graph)
j+=1
T = K.copy()
T.remove_edges_from(matching)
restore_4node_graph(T,fix_4_list)
nodes = max(nx.connected_components(T), key=len)
T2 = nx.subgraph(T, nodes).copy()
if nx.is_eulerian(T2):
all_matchings.append(matching)
print('found eulerian on fuzz attempt ', j)
index = len(all_matchings)-1
print('length of successful matching: ', len(matching))
print('matching ', index, ' is eulerian')
report(T2,'matching ' + str(index))
length = graph_length(T2)
save_png(T2,max_T2,bounds,index)
if length > max_length:
max_length = length
max_T2 = T2.copy()
max_fuzzed_Graph = fuzzed_Graph.copy()
Results after 1000 iterations:
...
current max length: 270
found eulerian on fuzz attempt 9999
length of successful matching: 68
matching 834 is eulerian
65 nodes matching 834
66 edges matching 834
total length 189.19 miles matching 834
number of odd intersections matching 834 : 0
number of even intersections matching 834 : 65
number of 2-way intersections matching 834 : 64
number of trailhead/terminus matching 834 : 0
current max length: 270
found eulerian on fuzz attempt 1000
length of successful matching: 68
matching 835 is eulerian
65 nodes matching 835
66 edges matching 835
total length 161.67 miles matching 835
number of odd intersections matching 835 : 0
number of even intersections matching 835 : 65
number of 2-way intersections matching 835 : 64
number of trailhead/terminus matching 835 : 0
current max length: 270
1:33:15
finished finding some possible matchings
max length = 270.4589642970273 miles
1:33:16
finished script max_trail3e.py
The color schemes chosen for the output graphs have been tweaked from the last article to be a bit easier to follow. (I am still having trouble finding a good combinations of colors and styles, as the current graph and maximum graph often overlap for much of their length.)
We have improved the maximum known circuit length from 228 to 270 miles, with modest effort.